Управління система із змінною структурою
Управл ення сист е ма з перем е ної структ у рій (СПС), нелінійна система автоматичного управління, що складається із сукупності безперервних підсистем (званих структурами) з певним правилом переходу в процесі функціонування від однієї структури даної сукупності до іншої. У СПС пристрій управління містить ключові елементи, які розривають або відновлюють зв'язку між функціональними елементами системи, змінюючи тим самим канали передачі впливів і забезпечуючи перехід від однієї структури системи до іншої (рис. 1). Такий принцип побудови пристрою управління істотно розширює можливості управління внаслідок використання корисних властивостей кожної зі структур і, крім того, дозволяє отримати нові властивості, не притаманні жодній із них.
Особливості СПС можна пояснити на прикладі найпростішої системи автоматичного управління (САУ), поведінка (рух) якої описується диференціальним рівнянням
 , (1)
, (1)
де х - керована величина, u - керуючий вплив, t - час. Нехай в САУ (1) можлива реалізація лише позитивною (u = b x, b = const> 0) і негативною (u = - a х, a = const> 0) зворотнього зв'язку (АИ b - коефіцієнт передачі ланки зворотнього зв'язку). При позитивного зворотного зв'язку рух САУ описується рівнянням  : (Структура I), а при негативній
: (Структура I), а при негативній  (Структура II). Для наочного уявлення поведінки (руху) САУ будують її фазові портрети (див. Фазової площині метод ) Для структури I (рис. 2, а) і структури II (рис. 2, б).
(Структура II). Для наочного уявлення поведінки (руху) САУ будують її фазові портрети (див. Фазової площині метод ) Для структури I (рис. 2, а) і структури II (рис. 2, б).
Завдання полягає в тому, що потрібно вибрати таке управління і з класу можливих управлінь, при якому система має асимптотической стійкістю. З аналізу фазових портретів системи слід, що ні позитивна, ні негативна зворотний зв'язок порізно не вирішує поставленого завдання. Тому відповідно до методами СПС реалізують наступне правило зміни структур:

(2)
 , C = const, 0 <c <
, C = const, 0 <c <  .
.
Фазовий портрет такої системи зображений на рис. 2, б; з аналізу портрета слід, що зображає точка з довільного початкового положення потрапляє на пряму s = 0, що проходить через початок координат, в околиці якої фазові траєкторії спрямовані назустріч один одному і, отже, що зображає точка не може покинути цю пряму. Траєкторія s = 0 не належить жодній з структур (I або II), тому, згідно з (2), за рахунок перемикання управління і в системі відбувається зміна структур теоретично з нескінченної частотою. Такий режим руху називається ковзаючим, а за рівняння руху приймається рівняння прямої s = 0:
 , C> 0. (3)
, C> 0. (3)
Всі рішення рівняння (3) прагнуть до нуля при t ® ¥, т. Е. Поставлена задача вирішена. Істотно, що рух системи в ковзному режимі не залежить від характеристик об'єкта управління і коефіцієнт зворотного зв'язку, якість перехідного процесу визначається тільки вибором параметра с.
Розглянутий приклад показує, що завдяки об'єднанню неприйнятних порізно структур і за рахунок використання ковзних режимів можна синтезувати СПС, які мають низку позитивних властивостей, зокрема апериодической стійкістю і параметричної инвариантностью . За допомогою СПС вирішується широке коло завдань теорії управління, наприклад завдання високоякісного відтворення задає впливу при інваріантності до параметричних і зовнішніх збурень, багатозв'язного регулювання, оптимізації та ін.
Літ .: Ємельянов С. В., Системи автоматичного керування зі змінною структурою, М., 1967; Системи зі змінною структурою та їх застосування в задачах автоматизації польоту, М., 1968; Теорія систем зі змінною структурою, М., 1970; Уткін В. І., Скользящие режими і їх застосування в системах зі змінною структурою, М., 1974.
Б. З. Голембо, С. К. Коровін.
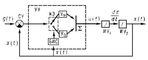
Мал. 1. Функціональна схема системи управління зі змінною структурою: УУ - пристрій управління; СУ - порівнює пристрій; КЕ - ключовий елемент; БІС - блок зміни структури; Σ - суматор; У a - підсилювач з коефіцієнтом передачі a; У b - підсилювач з коефіцієнтом передачі b; ІУ - інтегрують пристрої; g (t) - задає вплив; u (t) - керуючий вплив; x (t) - керована величина.

Мал. 2. Фазові портрети систем автоматичного управління: а - з позитивним зворотним зв'язком (структура I); б - з негативним зворотним зв'язком (структура II); в - зі змінною структурою; I - область руху системи зі структурою I; II - область руху системи зі структурою II; 0 - початок координат; x - керована величина; t - час.